|
Zixuan Zhuang I am an incoming Ph.D. student at the Hong Kong University of Science and Technology, under the supervision of Prof. Ping Tan. I got my Master's degree in Computer Technology from Sun Yat-sen University, advised by Prof. Hui Cheng. Previously, I was a visiting student at the National University of Singapore, under the supervision of Prof. Fan Shi. I was also a visiting student in the STAR Group at Sun Yat-sen University, working with Prof. Boyu Zhou. I received my Bachelor's degree in Electrical Engineering and Automation from Northeastern University in 2023. Email / Google Scholar / LinkedIn / Github |

|
Robots
|




Honors
|
ResearchMy research interests focus on locomotion and loco-manipulation for humanoid robots. Below are some representative projects and research works. |
|
SAC-Loco: Safe and Adjustable Compliant Quadrupedal Locomotion
Aoqian Zhang, Cheng Xiang, Zixuan Zhuang, Chunzheng Wang, Fan Shi†, Shuzhi Sam Ge† IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2026 PDF / An end-to-end joint-level locomotion policy with adjustable compliance, enabling adaptive motion under external forces while ensuring velocity tracking and robustness against large disturbances. |
|
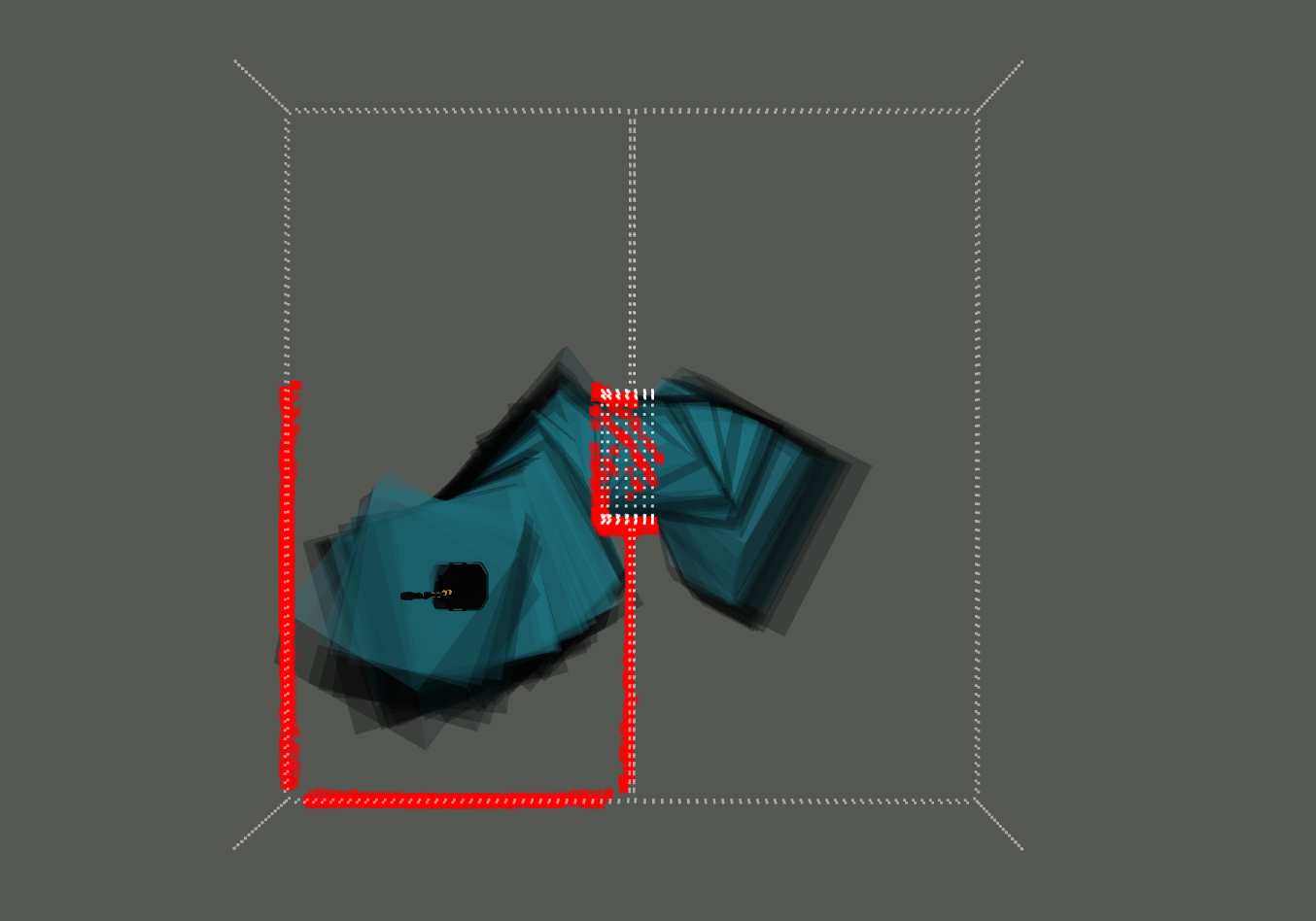
Real-time Motion Planning for Mobile Manipulators
Zixuan Zhuang Master Thesis, 2026 A real-time trajectory planning method for mobile manipulators using corridor constraints. |
|
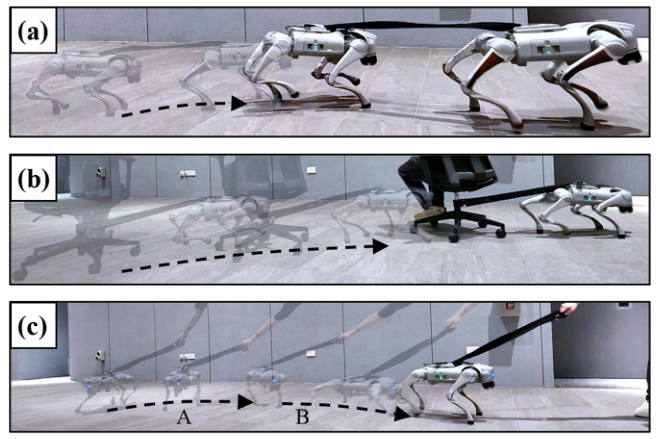
RM-Planner: Integrating Reinforcement Learning with Whole-Body Model Predictive Control for Mobile Manipulation
Zixuan Zhuang*, Le Zheng*, Wanyue Li, Renming Liu, Peng Lu, Hui Cheng† IEEE International Conference on Robotics & Automation (ICRA), 2025 video / PDF / We propose a mobile manipulation framework that integrates reinforcement learning with whole-body model predictive control for operation in unknown and complex environments. |

|
Star-Searcher: A Complete and Efficient Aerial System for Autonomous Target Search in Complex Unknown Environments
Yiming Luo, Zixuan Zhuang, Neng Pan, Chen Feng, Shaojie Shen, Fei Gao, Hui Cheng, Boyu Zhou† IEEE Robotics and Automation Letters (RA-L), 2024 video / PDF / We propose Star-Searcher, a hierarchical UAV-based target search system that combines viewpoint clustering and history-aware planning to achieve efficient and complete search in complex unknown environments. |
|
Feel free to steal this website's source code. Do not scrape the HTML from this page itself, as it includes analytics tags that you do not want on your own website — use the github code instead. Also, consider using Leonid Keselman's Jekyll fork of this page. |